数字图像处理——图像复原与重建初步
图像复原与重建初步
梳理所学重点知识
引言
前面所接触的图像增强是一个,已知原图像,经处理后,得到增强图像的一个过程,而这一章将要深入的图像复原(重建),则是希望从(被污染)过的图像,经处理后,得到原图像的过程,是以预先确定的目标来改善图像。图像复原试图利用退化现象的某种先验知识来复原被退化的图像。因而,复原技术时面向退化模型的,并且采用相反的过程进行处理,以便恢复出原图像。虽然图像增强和图像复原两者在覆盖的领域和使用的技术栈有所重叠,其中还是有几点区别我们还是要提起注意的。
形象化的描述
图像增强主要是一个主观的过程,而图像复原大部分是一个客观的过程。
已知与未知的区别
图像增强已知原始图像与变换(卷积核或者其频率域的谱),对于增强效果是未知且非预先确定的(只有一个大概方向,比如模糊还是锐化),而图像复原则已知污染图像,且对原始图像是预先确定的(测试条件下甚至是有标准比对的原始图像,是已知的),对于复原变换(污染变换的逆)常常是未知的,这就要求我们在做图像处理时常常需要“估计”我们的复原变换。
期望与探索的区别 由于两者已知和未知上的差距,这就导致图像复原通常会涉及设立一个最佳准则来产生期望结果的最佳估计。相比之下,图像增强技术基本上是一个探索性过程,即根据人类视觉系统的生理特点来设计改善图像的方法。
背景知识
线性系统
可加性,\(x_1(t)+x_2(t) = y_1(t)+y_2(t)\),从而有\(a \times x_1(t) = a \times y_1(t)\)
平移不变性
卷积
卷积、离散二维卷积
从而可以利用卷积这个工具。
冲激响应:输入为一个脉冲信号,输出是一个冲激响应\(h(x)\),实际上可以就是之前接触过的卷积核。
图形复原
复原
- 试图利用退化过程的先验知识使已退化的图像恢复本来面目
- 根据退化的原因,分析引起退化的环境因素
- 建立相应的数学模型
- 沿着使图像降质的逆过程回复图像
目的
- 在于消除或减轻退化的影响
方法
- 由于退化系统是黑盒的,盲复原往往很困难,噪声干扰也为复原过程带来了困难和不确定性
- 图像复原是寻求在一定优化准则下的原始图象的最有估计。因此,不同的优化准则会获得不同的图像复原。评价指标的选择目前也是研究的方向之一,如峰值信号比等。
图像退化/复原过程模型
退化过程(污染过程)的描述:建模为一个退化函数和一个加性噪声项,对于输入图像(原图像)\(f(x,y)\)进行处理,产生一副退化后的图像\(g(x,y)\),图像复原目的就是已知\(g(x,y)\)的前提下,希望得到原图像的一个估计,这个估计越接近原始输入图像越好。空间域中的退化图像可由下式给出:
\[g(x,y) = h(x,y) \star f(x,y) + \eta(x,y)\]
上式中\(h(x,y)\)是退化函数的空间表示,由第四章内容,我们可以将上式的模型写成等价的频率域表示:
\[g(u,v) = H(u,v) F(u,v) + N(u,v)\]
这两个式子是本章后面大部分复原内容的基础。
噪声模型
噪声的空间和频率特性
一些重要概念:
当噪声的傅里叶谱是常量时,噪声通常成为白噪声,这个术语是从白光的物理特性派生出来的,它以相等的比例包含可见光谱中的几乎所有频率。
除了空间周期噪声之外,本章假设其他噪声与空间坐标无关,并且噪声与图像本身不想管(即像素值与噪声成分的值之间不相关)。虽然这些假设至少在某些应用中(例如 X 射线和医学成像的有限量子成像就是一个很好的例子)是无效的,但处理空间相关和相关性噪声的复杂性超出了我们讨论的范围。
一些重要的噪声概率密度函数
概率论回顾
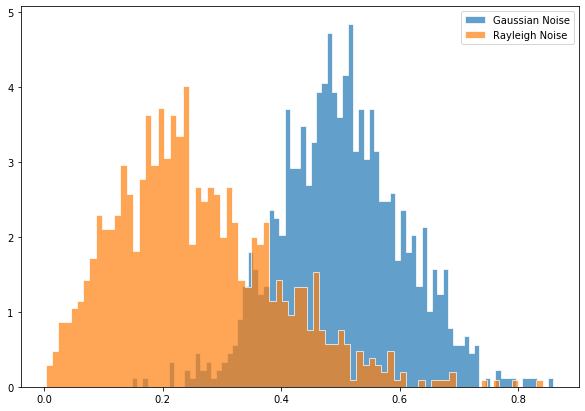
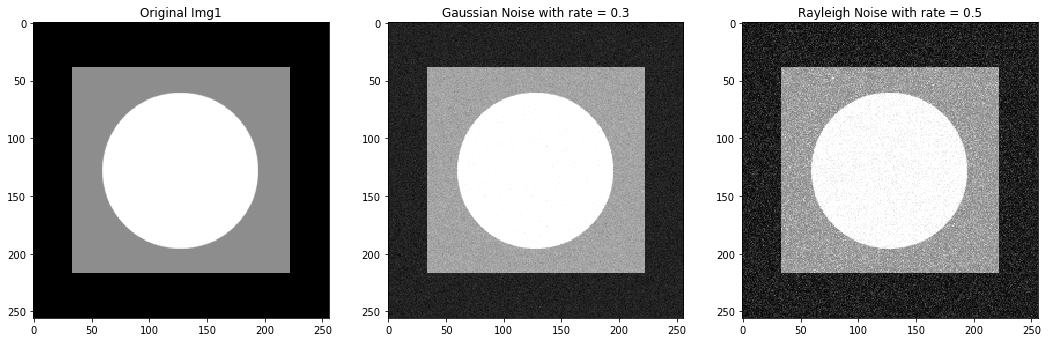
高斯(正态)噪声
其 PDF 由下式给出:
\[p(z) = \dfrac{1}{\sqrt{2 \pi} \sigma} e^{ \frac{ {(z- \overline{z})}^2 }{2 \sigma^2} }\]
\(\overline{z}\)表示\(z\)的均值,\(\sigma\)表示\(z\)的标准差。
瑞利噪声
其 PDF 由下式给出:
概率密度的均值与方差的给出:\(\overline{z} = a + \sqrt{ \pi b / 4}\),\(\sigma ^2 = \dfrac{b(4-\pi)}{4}\)
爱尔兰(伽马)噪声
其 PDF 由下式给出:
概率密度的均值与方差的给出:\(\overline{z} = \dfrac{b}{a}\) ,\(\sigma ^2 = \dfrac{b}{a^2}\)
指数噪声
其 PDF 由下式给出:
\[ p(z)=\left \{ \begin{aligned} ae^{ -az} & , & z \ge a \\ 0 & , & z < a \end{aligned} \right. \]
可以看作是\(b=1\)时爱尔兰 PDF 的特殊情况。概率密度的均值和方差是:\(\overline{z} = \dfrac{1}{a}\),\(\sigma^2 = \dfrac{1}{a^2}\)
均匀噪声
其 PDF 由下式给出:
\[ p(z)=\left \{ \begin{aligned} \dfrac{1}{b-a} & , & a \le z \le b \\ 0 & , & 其他 \end{aligned} \right. \]
概率密度的均值与方差的给出:\(\overline{z} = \dfrac{a+b}{2}\),\(\sigma^2 = \dfrac { { (b-a)}^2}{12}\)
脉冲(椒盐)噪声
其 PDF 由下式给出:
\[ p(z)=\left \{ \begin{aligned} P_a & , & z = a \\ P_b & , & z = b \\ 1-P_a-P_b & , & 其他 \end{aligned} \right. \]
1 | |
1 | |

本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!